RV减速机-谐波减速机-精攻
“RV减速机-谐波减速机-精攻”参数说明
| 品牌: | 谐波减速机 | 加工定制: | 是 |
| 类别: | 齿轮减速机 | 齿轮类型: | 圆柱齿轮 |
| 布局形式: | 摆线式 | 传动级数: | 三级 |
| 齿面硬度: | 硬齿面 | 安装形式: | 立式 |
| 输入转速: | 3000 | 额定功率: | 0.6 |
| 输出转速范围: | 3500 | 许用扭矩: | 15nm |
| 使用范围: | 伺服、步进电机 | 型号: | Xb |
| 规格: | 0 | 商标: | RV/谐波 |
| 包装: | 泡沫固定机身 | 产量: |
“RV减速机-谐波减速机-精攻”详细介绍
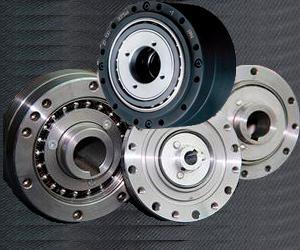
谐波减速机主要由三个基本构件组成:
(1)带有内齿圈的刚性齿轮(刚轮),它相当于行星系中的中心轮;
(2)带有外齿圈的柔性齿轮(柔轮),它相当于行星齿轮;
(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。
波发生器是使柔轮产生可控弹性变形的构件。
当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。
当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
工作时,固定刚轮,由电机带动波发生器转动,柔轮作为从动轮,输出转动,带动负载运动。在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以 n 表示。常用的是双波和三波两种。
双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。
故为目前应用最广的一种。
虽然这个谐波减速机只有是三个重要组成部件但是在能完美制作这个谐波减速机的厂商只有日本的Nabtesco和Harmonic Drive虽然并不是只有他们会制作,而是他们的谐波减速机制作工艺和掌握的技术含量比其他厂家多太多了。就目前全球机器人行业75%的精密减速机被日本的Nabtesco和Harmonic Drive两家垄断(业界俗称RV减速机和谐波减速机),包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。其中Harmonic Drive在工业机器人关节领域拥有15%的市场占有率。
从以上的数据可以看出了此减速机的制作工艺并不简单。
RV减速机的主要缺点
(1)柔轮周期性地发生变形,因而产生交变应力,使之易于产生疲劳破坏。
(2)转动惯量和起动力矩大,不宜用于小功率的跟踪传动。
(3)不能用于传动速比小于35的场合。
(4)采用滚子波发生器(自由变形波)的谐波传动,其瞬时传动比不是常数。
(5)散热条件差。
(1)带有内齿圈的刚性齿轮(刚轮),它相当于行星系中的中心轮;
(2)带有外齿圈的柔性齿轮(柔轮),它相当于行星齿轮;
(3)波发生器H,它相当于行星架。
作为减速器使用,通常采用波发生器主动、刚轮固定、柔轮输出形式。
波发生器H是一个杆状部件,其两端装有滚动轴承构成滚轮,与柔轮1的内壁相互压紧。柔轮为可产生较大弹性变形的薄壁齿轮,其内孔直径略小于波发生器的总长。
波发生器是使柔轮产生可控弹性变形的构件。
当波发生器装入柔轮后,迫使柔轮的剖面由原先的圆形变成椭圆形,其长轴两端附近的齿与刚轮的齿完全啮合,而短轴两端附近的齿则与刚轮完全脱开。周长上其他区段的齿处于啮合和脱离的过渡状态。
当波发生器沿图示方向连续转动时,柔轮的变形不断改变,使柔轮与刚轮的啮合状态也不断改变,由啮入、啮合、啮出、脱开、再啮入……,周而复始地进行,从而实现柔轮相对刚轮沿波发生器H相反方向的缓慢旋转。
工作时,固定刚轮,由电机带动波发生器转动,柔轮作为从动轮,输出转动,带动负载运动。在传动过程中,波发生器转一周,柔轮上某点变形的循环次数称为波数,以 n 表示。常用的是双波和三波两种。
双波传动的柔轮应力较小,结构比较简单,易于获得大的传动比。
故为目前应用最广的一种。
虽然这个谐波减速机只有是三个重要组成部件但是在能完美制作这个谐波减速机的厂商只有日本的Nabtesco和Harmonic Drive虽然并不是只有他们会制作,而是他们的谐波减速机制作工艺和掌握的技术含量比其他厂家多太多了。就目前全球机器人行业75%的精密减速机被日本的Nabtesco和Harmonic Drive两家垄断(业界俗称RV减速机和谐波减速机),包括ABB、FANUC、KUKA等国际主流机器人厂商的减速器均由上述两家公司提供。其中Harmonic Drive在工业机器人关节领域拥有15%的市场占有率。
从以上的数据可以看出了此减速机的制作工艺并不简单。
RV减速机的主要缺点
(1)柔轮周期性地发生变形,因而产生交变应力,使之易于产生疲劳破坏。
(2)转动惯量和起动力矩大,不宜用于小功率的跟踪传动。
(3)不能用于传动速比小于35的场合。
(4)采用滚子波发生器(自由变形波)的谐波传动,其瞬时传动比不是常数。
(5)散热条件差。
编辑:南昌倍特精密工业有限公司 时间:2018/05/11
下一条:新宝谐波减速机